
|




| 外型尺寸 | 定制 |
| 品牌 | HC |
| 货号 | 001 |
| 用途 | 清污 |
| 型号 | 可定制 |
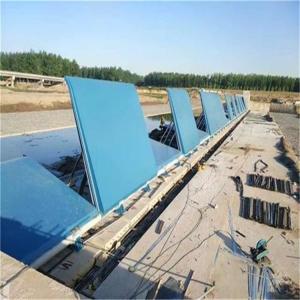
粉碎格栅除污机是由合金钢或不锈钢板做成的独特形耙齿,按必须的排序顺序装在耙齿轴上产生密闭式耙齿链,其下边装在进水沟水里。当传动装置推动链轮链条作均速定项转动时,全部耙齿链便由上而下健身运动,并带上液体脏物从液體中提取,流体力学根据耙齿空隙流出去,全部工作态度持续开展。因为该机器设备设计有效,在机器设备工作中时,本身具备较强的自净作用工作能力,不容易产生阻塞问题, 因此平时检修劳动量非常少。
粉碎格栅除污机
主要技术特点:
1.具有移动式多工位在线自动清污功能,清污能力强,操作性能好。
2.清污耙斗与格栅齿槽可靠啮合,有效清除栅面污物;采用倒钩梯形耙齿,有效防止耙斗在提升过程中污物脱落。
3.耙齿启闭机构设计独特,在清污机机身及拦污栅任意位置均可打开或闭合;耙斗能以佳倾角开启卸污,确保卸污彻底干净。
4. 清污机横向行走自动定位精度高,对位偏差<2mm。
5.清污装置(耙斗)在清污过程中,动作准确可靠,清污效率高。
(1).耙斗下降,准备进行清污,此时耙斗斗底呈张开状态。
(2).耙斗下降到孔口高程后,耙斗斗底自动闭合,斗齿在机械杠杆力的作用下,插入拦污栅栅面。
(3).耙斗上升,刮除附着在拦污栅面上的污物,在清污过程中,耙斗处于自锁的状态下,斗底不会打开。
(4).耙斗卸污,耙斗上升到顶部卸污点时,斗底自动打开,卸去斗中的污物。
上述耙斗张开、闭合、自锁、开锁的一套曲柄连杆操纵机构,是本机专利保护的关键技术。
6. 整机采用PLC可编程序控制器实现清污机横向行走定位、耙斗升降清污卸污的全过程自动控制。
7. 电气、机械安全保护措施完善,兼备声光报警:
8. 各驱动电机均设有过流、过热保护,运转过载时各电机自动停止并发出故障报警信号;
。

抓斗清污机在清理过程中的两种主要工作方式是抓取和压制垃圾。抓斗式清污机的“抓取”工作方式主要是针对浮土或浅水中的污垢。操作过程如下:首先降低抓具,然后在维护平台下方打开抓具,然后将抓具降低到预定的清洗位置(由位置传感器控制)停止。启动液压系统,电机空载运行。按下“抓取关闭”按钮。气缸活塞杆在压力油的作用下向前伸出,带动抓斗闭合,使污物进入斗内。关闭结束以后,液压系统回路将会被系统内设置的限位保护装置自动断开。然后按下抓取提升按钮,将其提升到塔顶。打开车门、机车、大车运行机构至卸料场,然后打开抓斗卸料污染。